
2024
Simon, A., Weimar, J., Martius, G., Oettel, M.
Machine learning of a density functional for anisotropic patchy particles
Journal of Chemical Theory and Computation, 2024 (article)
2023
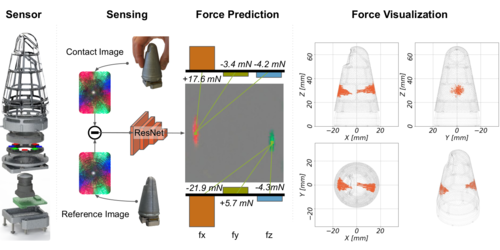
Andrussow, I., Sun, H., Kuchenbecker, K. J., Martius, G.
Minsight: A Fingertip-Sized Vision-Based Tactile Sensor for Robotic Manipulation
Advanced Intelligent Systems, 5(8):2300042, August 2023, Inside back cover (article)

Lee, H., Sun, H., Park, H., Serhat, G., Javot, B., Martius, G., Kuchenbecker, K. J.
Predicting the Force Map of an ERT-Based Tactile Sensor Using Simulation and Deep Networks
IEEE Transactions on Automation Science and Engineering, 20(1):425-439, January 2023 (article)
Camps-Valls, G., Gerhardus, A., Ninad, U., Varando, G., Martius, G., Balaguer-Ballester, E., Vinuesa, R., Diaz, E., Zanna, L., Runge, J.
Discovering causal relations and equations from data
Physics Reports, 1044, pages: 1-68, 2023 (article)
Franca, F. D., Virgolin, M., Kommenda, M., Majumder, M., Cranmer, M., Espada, G., Ingelse, L., Fonseca, A., Landajuela, M., Petersen, B., Glatt, R., Mundhenk, N., Lee, C., Hochhalter, J., Randall, D., Kamienny, P., Zhang, H., Dick, G., Simon, A., Burlacu, B., Kasak, J., Machado, M., Wilstrup, C., Cava, W. L.
Interpretable Symbolic Regression for Data Science: Analysis of the 2022 Competition
arXiv, 2023 (article)
2022
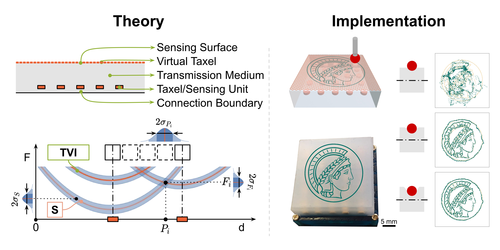
Sun, H., Martius, G.
Guiding the Design of Superresolution Tactile Skins with Taxel Value Isolines Theory
Science Robotics, 7(63):eabm0608, February 2022 (article)
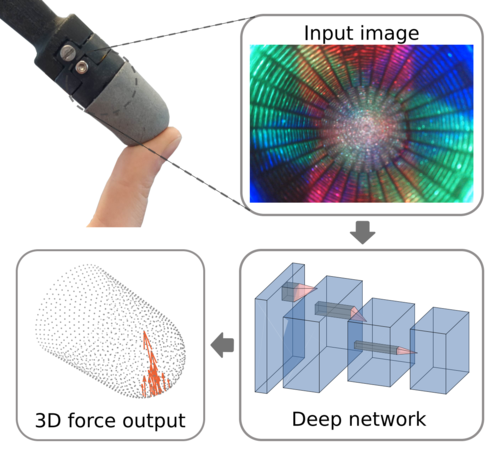
Sun, H., Kuchenbecker, K. J., Martius, G.
A Soft Thumb-Sized Vision-Based Sensor with Accurate All-Round Force Perception
Nature Machine Intelligence, 4(2):135-145, February 2022 (article)
Carnazza, F. C. F. Z. D. A. S. M. G. L. I.
Inferring Markovian quantum master equations of few-body observables in interacting spin chains
New Journal of Physics, 24(7), IOP Publishing, 2022 (article)
Khajehabdollahi, S. P. J. G. E. M. G. L. A.
When to Be Critical? Performance and Evolvability in Different Regimes of Neural Ising Agents
Artificial Life, 28(4):458-478, 2022 (article)
Scholz, F., Gumbsch, C., Otte, S., Butz, M. V.
Inference of affordances and active motor control in simulated agents
Frontiers in Neurobiotics, 16, 2022 (article)
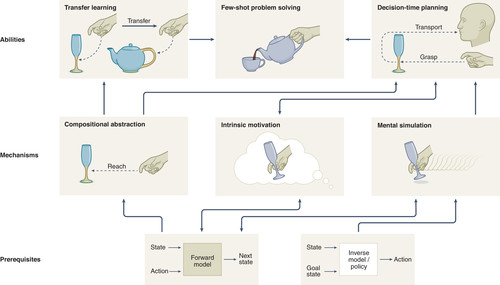
Eppe, M., Gumbsch, C., Kerzel, M., Nguyen, P. D. H., Butz, M. V., Wermter, S.
Intelligent problem-solving as integrated hierarchical reinforcement learning
Nature Machine Intelligence, 4(1):11-20, 2022 (article)
2021
Bogomolov, B. S., Frehse, G., Gurung, A., Li, D., Martius, G., Ray, R.
Falsification of hybrid systems with symbolic reachability analysis and trajectory splicing
Nonlinear Analysis: Hybrid Systems, 42, pages: 101093, Elsevier, November 2021 (article)
Kloss, A., Martius, G., Bohg, J.
How to Train Your Differentiable Filter
Autonomous Robots, 45(4):561-578, Springer, June 2021 (article)
Mazza, P. P., Zietlow, D., Carollo, F., Andergassen, S., Martius, G., Lesanovsky, I.
Machine learning time-local generators of open quantum dynamics
Physical Review Research, 3(2):023084, April 2021 (article)

Gumbsch, C., Adam, M., Elsner, B., Butz, M. V.
Emergent Goal-Anticipatory Gaze in Infants via Event-Predictive Learning and Inference
Cognitive Science, 45(8):e13016, Wiley, January 2021 (article)
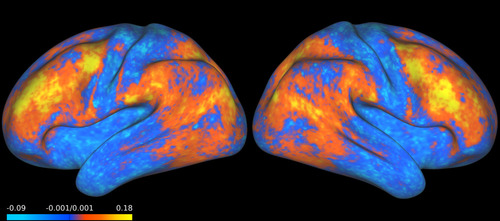
Lacosse, E., Scheffler, K., Lohmann, G., Martius, G.
Jumping over baselines with new methods to predict activation maps from resting-state fMRI
Scientific Reports, 11, pages: 3480, Nature Group, 2021 (article)
Landgraf, C., Meese, B., Pabst, M., Martius, G., Huber, M. F.
A Reinforcement Learning Approach to View Planning for Automated Inspection Tasks
Sensors, 21(6):2030, MDPI, 2021 (article)
Gershenson, C., Polani, D., Martius, G.
Editorial: Complexity and Self-Organization
Frontiers in Robotics and AI, 8, pages: 72, 2021 (article)
Kehrer, S., Zietlow, D., Scheffold, J., Blochinger, W.
Self-tuning serverless task farming using proactive elasticity control
Cluster Computing, 24(2):799-817, Springer, 2021 (article)
Adam, M., Gumbsch, C., Butz, M. V., Elsner, B.
The Impact of Action Effects on Infants’ Predictive Gaze Shifts for a Non-Human Grasping Action at 7, 11, and 18 Months
Frontiers in Psychology, 12, pages: 695550, 2021 (article)
2020
Lin, S., Martius, G., Oettel, M.
Analytical classical density functionals from an equation learning network
The Journal of Chemical Physics, 152(2):021102, 2020 (article)
2019
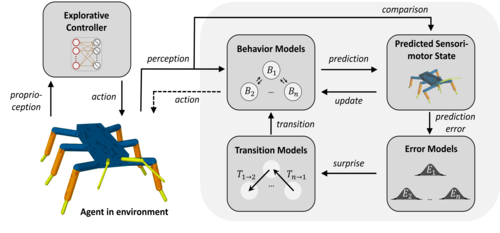
Gumbsch, C., Butz, M. V., Martius, G.
Autonomous Identification and Goal-Directed Invocation of Event-Predictive Behavioral Primitives
IEEE Transactions on Cognitive and Developmental Systems, 13(2):298-311, June 2019 (article)
Kazda, A., Kolmogorov, V., Rolinek, M.
Even Delta-Matroids and the Complexity of Planar Boolean CSPs
ACM Transactions on Algorithms, 15(2):1-33, 2019, Article No. 22 (article)

Sun, H., Martius, G.
Machine Learning for Haptics: Inferring Multi-Contact Stimulation From Sparse Sensor Configuration
Frontiers in Neurorobotics, 13, pages: 51, 2019 (article)
2018
Botella-Soler, V., Deny, S., Martius, G., Marre, O., Tkačik, G.
Nonlinear decoding of a complex movie from the mammalian retina
PLOS Computational Biology, 14(5):1-27, Public Library of Science, May 2018 (article)
2017
Der, R., Martius, G.
Self-Organized Behavior Generation for Musculoskeletal Robots
Frontiers in Neurorobotics, 11, pages: 8, 2017 (article)
2015
Der, R., Martius, G.
Novel plasticity rule can explain the development of sensorimotor intelligence
Proceedings of the National Academy of Sciences, 112(45):E6224-E6232, 2015 (article)
Martius, G., Olbrich, E.
Quantifying Emergent Behavior of Autonomous Robots
Entropy, 17(10):7266, 2015 (article)
2013
Martius, G., Der, R., Ay, N.
Information Driven Self-Organization of Complex Robotic Behaviors
PLoS ONE, 8(5):e63400, Public Library of Science, 2013 (article)
Zahedi, K., Martius, G., Ay, N.
Linear combination of one-step predictive information with an external reward in an episodic policy gradient setting: a critical analysis
Frontiers in Psychology, 4(801), 2013 (article)
Martius, G.
Robustness of guided self-organization against sensorimotor disruptions
Advances in Complex Systems, 16(02n03):1350001, 2013 (article)
2012
Martius, G., Herrmann, J.
Variants of guided self-organization for robot control
Theory in Biosci., 131(3):129-137, Springer Berlin / Heidelberg, 2012 (article)
2009
Hesse, F., Martius, G., Der, R., Herrmann, J. M.
A Sensor-Based Learning Algorithm for the Self-Organization of Robot Behavior
Algorithms, 2(1):398-409, 2009 (article)
2006
Der, R., Hesse, F., Martius, G.
Rocking Stamper and Jumping Snake from a Dynamical System Approach to Artificial Life
Adaptive Behavior, 14(2):105-115, 2006 (article)