
2024
2022
Richardson, B. A., Kuchenbecker, K. J., Martius, G.
A Sequential Group VAE for Robot Learning of Haptic Representations
pages: 1-11, Workshop paper (8 pages) presented at the CoRL Workshop on Aligning Robot Representations with Humans, Auckland, New Zealand, December 2022 (misc)

Andrussow, I., Sun, H., Kuchenbecker, K. J., Martius, G.
A Soft Vision-Based Tactile Sensor for Robotic Fingertip Manipulation
Workshop paper (1 page) presented at the IROS Workshop on Large-Scale Robotic Skin: Perception, Interaction and Control, Kyoto, Japan, October 2022 (misc)
2021
Sun, H., Martius, G., Kuchenbecker, K. J.
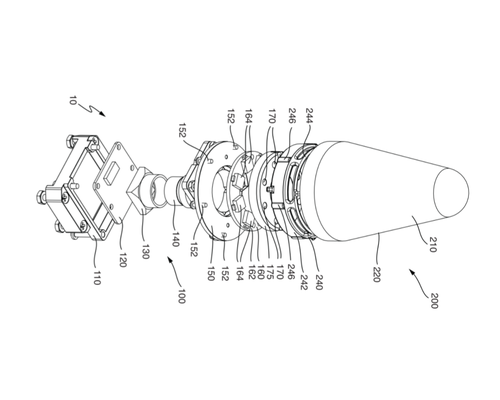
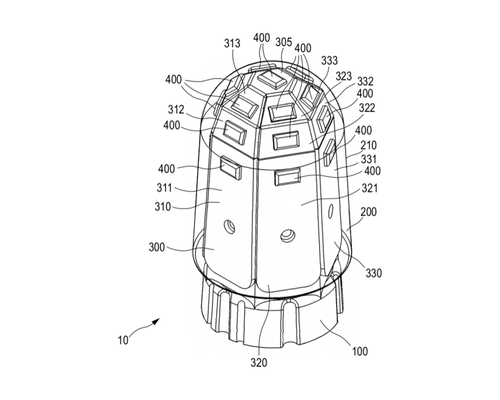
Sensor arrangement for sensing forces and methods for fabricating a sensor arrangement and parts thereof
(PCT/EP2021/050230), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
Sun, H., Martius, G., Kuchenbecker, K. J.
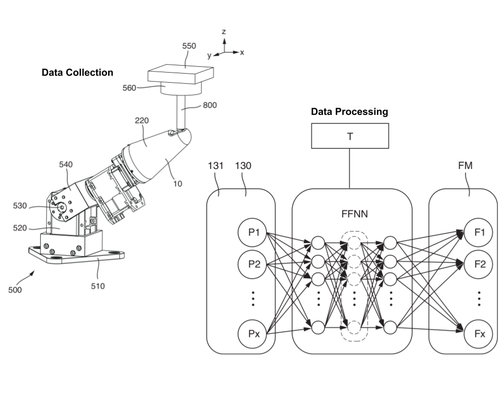
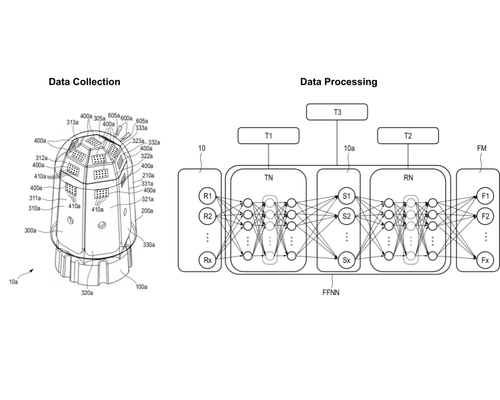
Method for force inference, method for training a feed-forward neural network, force inference module, and sensor arrangement
(PCT/EP2021/050231), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
Werner, M., Junginger, A., Hennig, P., Martius, G.
Informed Equation Learning
arXiv, 2021 (misc)
2020
Sun, H., Martius, G., Lee, H., Spiers, A., Fiene, J.
Method for Force Inference of a Sensor Arrangement, Methods for Training Networks, Force Inference Module and Sensor Arrangement
(PCT/EP2020/083261), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, November 2020 (patent)
Spiers, A., Sun, H., Lee, H., Martius, G., Fiene, J., Seo, W. H.
Sensor Arrangement for Sensing Forces and Method for Farbricating a Sensor Arrangement
(PCT/EP2020/083260), November 2020 (patent)
2016
Martius, G., Lampert, C. H.
Extrapolation and learning equations
2016, arXiv preprint 1610.02995 (misc)
2014
Martius, G., Der, R., Herrmann, J. M.
Robot Learning by Guided Self-Organization
In Guided Self-Organization: Inception, 9, pages: 223-260, Emergence, Complexity and Computation, Springer Berlin Heidelberg, 2014 (incollection)
2013
Der, R., Martius, G.
Behavior as broken symmetry in embodied self-organizing robots
In Advances in Artificial Life, ECAL 2013, pages: 601-608, MIT Press, 2013 (incollection)
2011
Martius, G., Herrmann, J. M.
Tipping the Scales: Guidance and Intrinsically Motivated Behavior
In Advances in Artificial Life, ECAL 2011, pages: 506-513, (Editors: Tom Lenaerts and Mario Giacobini and Hugues Bersini and Paul Bourgine and Marco Dorigo and René Doursat), MIT Press, 2011 (incollection)
2010
Martius, G., Hesse, F., Güttler, F., Der, R.
\textscLpzRobots: A free and powerful robot simulator
\urlhttp://robot.informatik.uni-leipzig.de/software, 2010 (misc)
Der, R., Martius, G.
Playful Machines: Tutorial
\urlhttp://robot.informatik.uni-leipzig.de/tutorial?lang=en, 2010 (misc)
Martius, G., Herrmann, J. M.
Taming the Beast: Guided Self-organization of Behavior in Autonomous Robots
In From Animals to Animats 11, 6226, pages: 50-61, LNCS, Springer, 2010 (incollection)