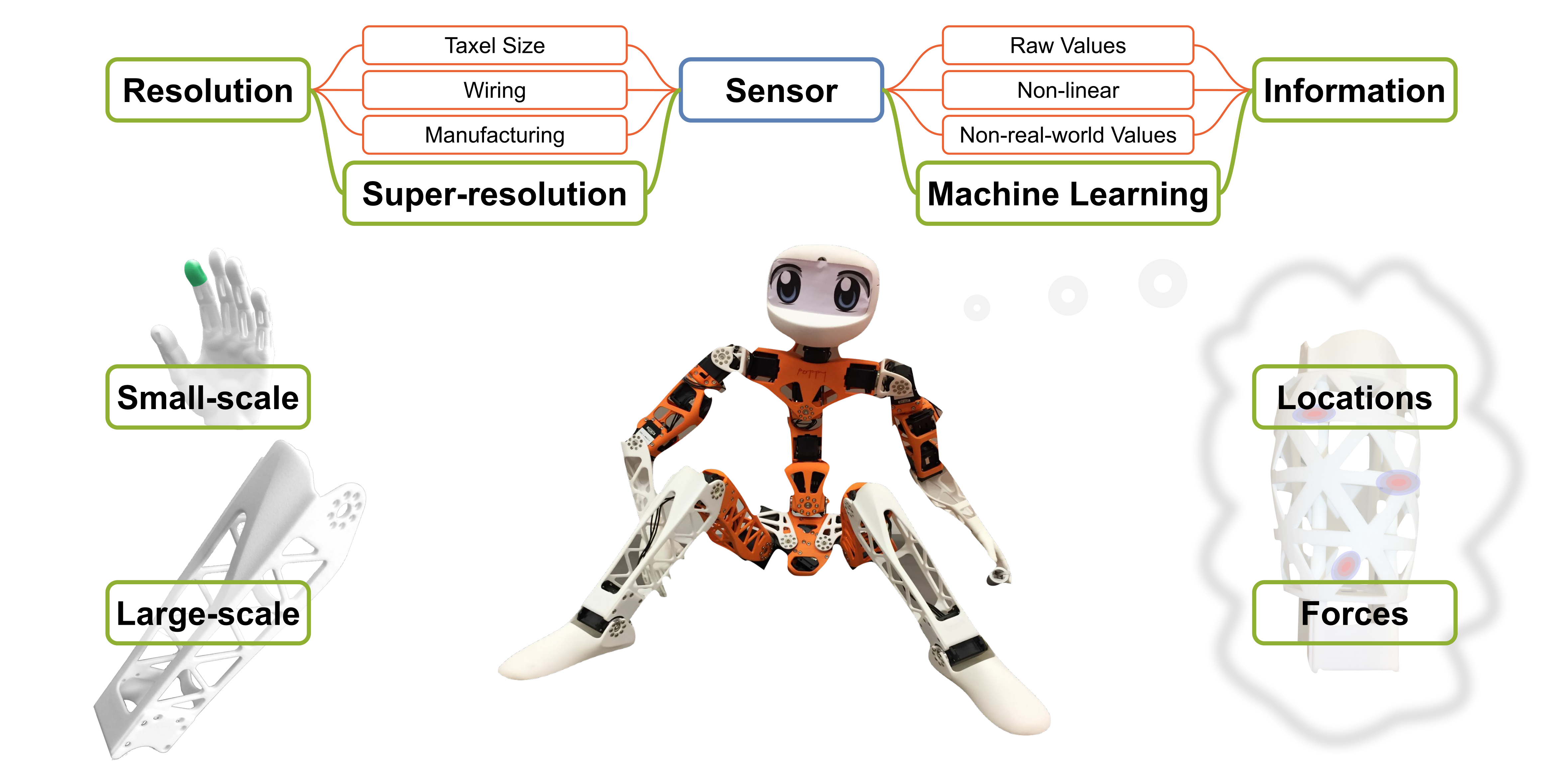
Robots like Poppy need haptic feedback for small-scale (green highlighted fingertip — middle left) and large-scale (white limb — bottom left) surfaces. We aim for creating robust haptic sensors with super-resolution property that reduces taxel number, wiring, and manufacturing costs. Machine learning methods are employed to interpret non-linear raw sensor values into real-world values and timely deliver the host robot needed haptic information, such as contact locations and forces.
The rapid evolution of robotic technologies informs practical benefits in various physical application areas. In complex, changing, and especially human-involved scenarios, a robot must be well-equipped to perceive the interactions between its own body and other things. Due to the visual occlusion and the small scale of the deformations during interactions, robots need touch-sensitive skin in addition to well-developed vision feedback. In this research field, we explore creating durable and robust haptic sensors to meet various application requirements and design machine-learning algorithms to enhance the data processing flow.



