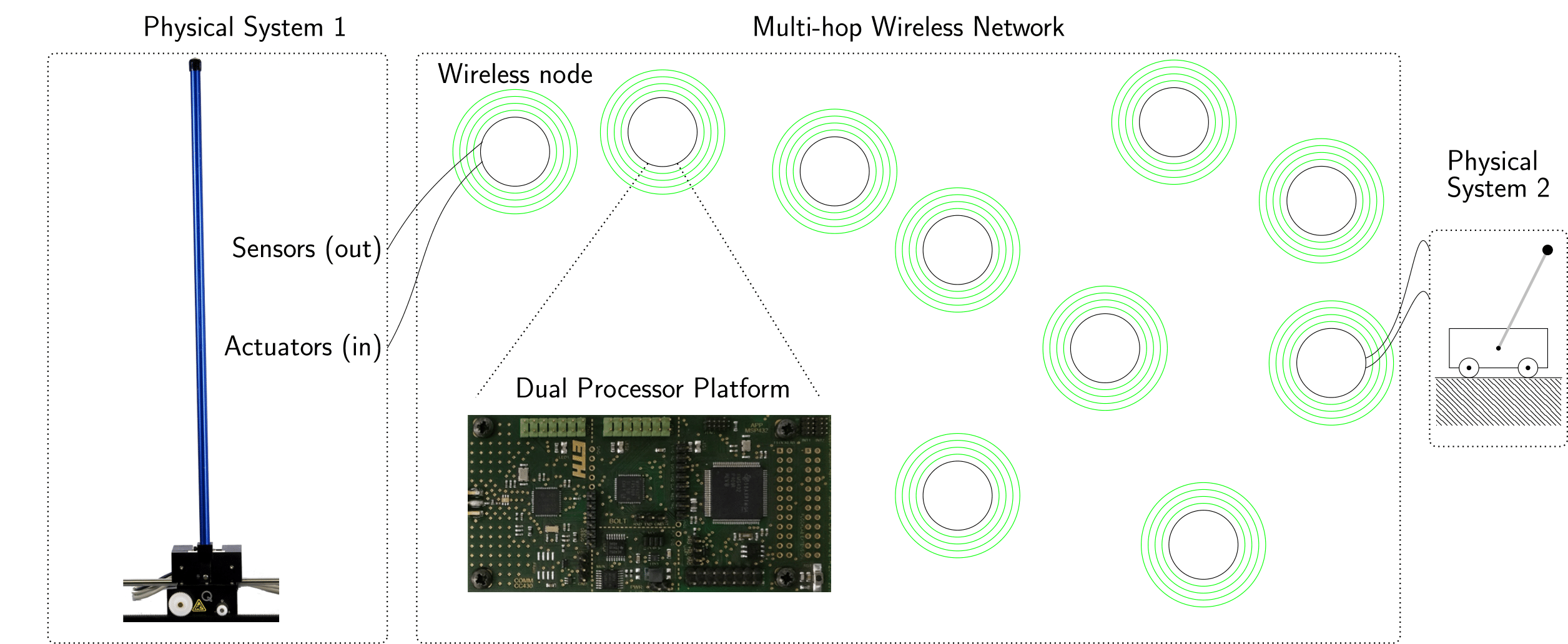
Schematic of the cyber-physical testbed developed within this project to investigate novel approaches for feedback control over wireless networks. A wireless multi-hop network connects multiple physical cart-pole systems. Each of the wireless nodes is implemented by a Dual Processor Platform, which combines an application and a communication processor for end-to-end-real-time operation. The testbed can be flexibly used to study, for example, stabilization and synchronization over wireless, which are relevant for control in CPSs in general.
Cyber-physical systems (CPS) tightly integrate physical processes with computing and communication, thus, enabling emerging applications such as coordinated flight of autonomous vehicles or controlling factory automation machinery over wireless networks. The adoption of wireless technology offers unprecedented flexibility in sharing data between these systems, for example, to increase collective information or take collaborative action, but also comes with severe challenges. Wireless networks are orders of magnitude less reliable than wired communication, while feedback control typically poses strict requirements on reliability and timeliness of data.
Within this project, novel feedback control strategies are developed in order to realize the full potential of future CPSs [ ]. This is done by a tight co-design of network protocol and control system. The protocol tames natural imperfections of wireless communication to the extent possible. The control design then takes the remaining imperfections (delays and packet losses) into account to realize stable closed-loop control over low-power multi-hop networks. Stability is proven through a formal analysis and demonstrated on the cyber-physical testbed shown above that includes multiple, spatially distributed physical processes controlled over a multi-hop low-power wireless network [ ].
A further challenge in wireless CPS is that they can easily be overloaded when multiple systems communicate over the same network. In order to realize energy savings and optimal system-level performance, communication should occur only if necessary to achieve desired performance. Current research activities within this project focus on the development of novel event-triggering mechanisms [ ] for the integration of control with the communication system and on learning-based concepts for further resource savings [ ].
The project is funded within the German Research Foundation (DFG) Priority Program on "Cyber-physical Networking" (SPP 1914, joint grant to Dr. Trimpe and Dr. Zimmerling). More information on the Priority Program can be found here.
![]()